技术架构先进
基于数字孪生的虚实协同控制,实现“以虚驭实、虚实同步”
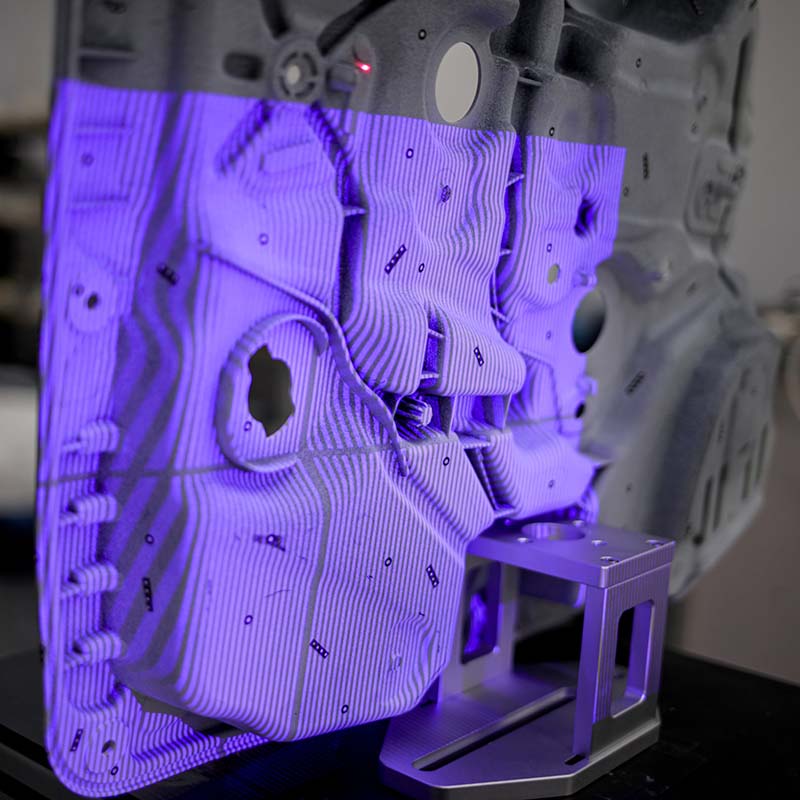
基于数字孪生与人工智能深度融合集成多轴机械臂与多光路光度立体视觉,实现了对工件曲平面交替表面的自适应覆盖成像。核心采用数字孪生框架驱动虚实协同,可依据三维工艺模型自动规划无碰撞检测路径,在成像端,通过多角度光源序列照射与同步采集,获取蕴含丰富纹理信息的多视图图像;在算法端,运用深度学习进行多视图特征融合,精准识别划伤、磕伤、裂纹等缺陷,并基于重建的三维表面进行非接触式粗糙度定量评级。
本系统是基于数字孪生与人工智能融合的智能表面检测平台,具备三大核心功能:一是全自动柔性检测,通过数字孪生驱动多轴机械臂,可依据三维工艺模型自动规划路径,实现对多品种、多曲率复杂工件的自适应全覆盖检测。二是高精度缺陷识别,采用多光路光度立体成像技术,结合深度学习多视图融合算法,能够精准定位与分类如划伤、磕伤等表面缺陷。三是非接触粗糙度评级,基于重建的高精度三维表面形貌,通过频域分析实现粗糙度Ra值的快速定量测量与等级评定。系统成功替代传统人工目检,解决了复杂构件检测效率低、一致性差及粗糙度评价难的行业痛点。
| 视觉传感器 | 高清面阵工业相机,支持多路光源同步触发 |
| 光源系统 | 4至8路共面可编程LED光源,支持多光路协同照明 |
| 成像方式 | 光度立体成像,支持多视图融合 |
| 检测缺陷类型 | 磕伤、划伤、裂纹、连皮等常见表面缺陷 |
| 粗糙度评级 | 基于光度立体重建,支持Ra值计算与分级 |
| 网络架构 | 支持MES集成,支持多终端访问,支持云端模型训练 |
| 软件功能 | 实时缺陷报警、历史回溯、样本库管理、模型迭代训练 |
| 运行模式 | 全自动/半自动/手动模式可选 |